1 hour ago, OandO said:
I presume this is part of a routine for finding the nearest points between two shapes? In which case, Point p has already been calculated as a point in the plane of the triangle.
Now, imagine a rigid frame with points A, B and C. When you project the triangle and Point p into a 2D plane, you create a flat image. Depending on the sign of the projection axis compared with the sign of the triangle's normal you might get a flipped image, but you then move, rotate and stretch the whole image so that A, B and C on the image match up with A, B and C on the frame. This is your barycentric coordinate system, with distances measured relative to the vertices and edges of the fixed frame, not the image or the original triangle.
Whatever projection you use, Point p will have the same barycentric coordinates. The reason for using the axis most closely aligned with the normal (You could use the normal itself, but then converting back to world space is slightly more complicated for no real benefit) is that you get the widest possible spread of triangle points in the projected image. This means you don't get degenerate triangles (Imagine projecting along the axis perpendicular to the normal, the image of your triangle would just be a line) and you minimise the likelihood of Point p ending up on the outside due to float point rounding (In practice, if it does end up on the wrong side it's probably still close enough to be useful).
Does that help?
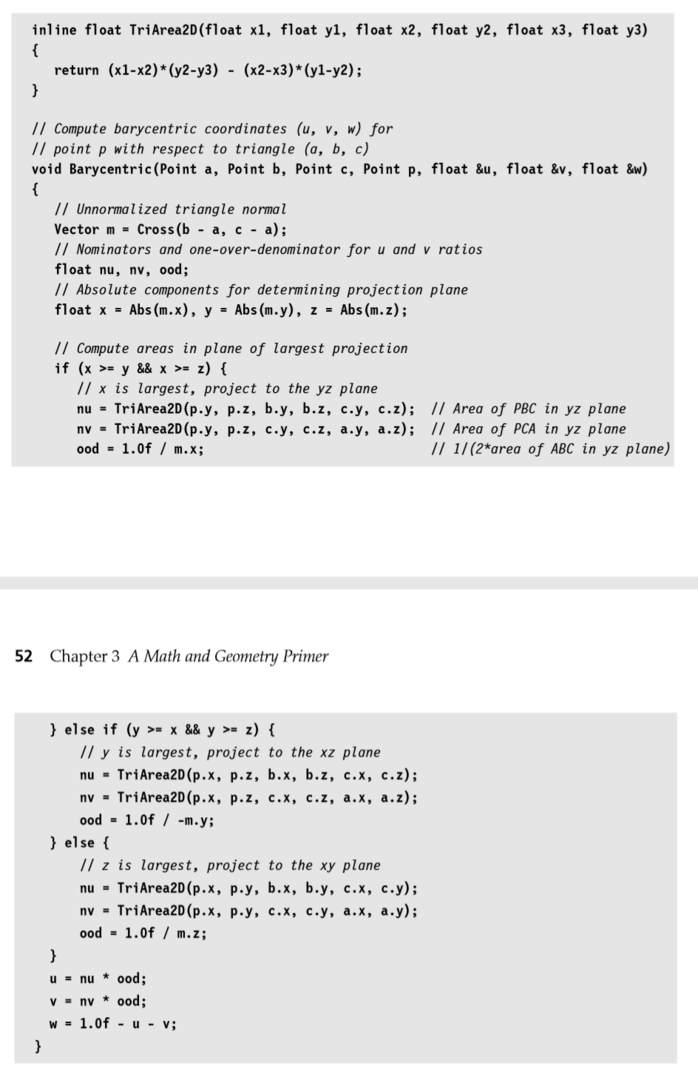
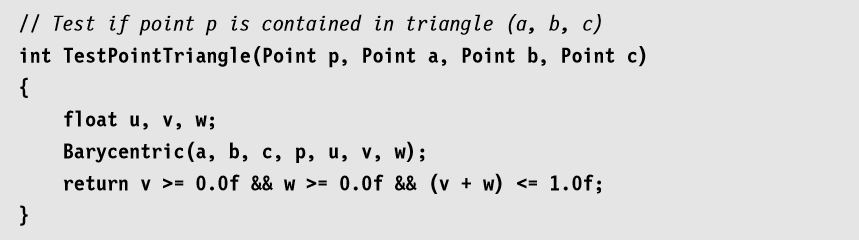
From the code image linked below, it shows how this function is used by the author. So I would assume the function aims to find if point p is within the triangle defined by point a, b, and c by checking if the returned u and v values match up.
13 minutes ago, NewbZach said:
Thats why the book says that barycentric coordinates are invariant between planes of projection. As the magnitude of the normal represents twice the surface area of the triangle formed by the 2 vectors, by projecting the triangle onto a plane, we can get the magnitude of the normal without any calculation as the other two values will be 0. (I think) essentially saying that although the areas of the sub-triangles (u and v before dividing by total area) on different planes (xy, xz, yz) are different, because the total area (represented by the normal resulting from the cross product) is also different, the ratio between sub-triangle areas and total area is maintained. What I don't really understand is how these projected u and v values are represented in the original un-projected triangle. If the values are calculated in 2 dimensions, which means having less information then in 3 dimensions, how does it get represented in 3 dimensions?
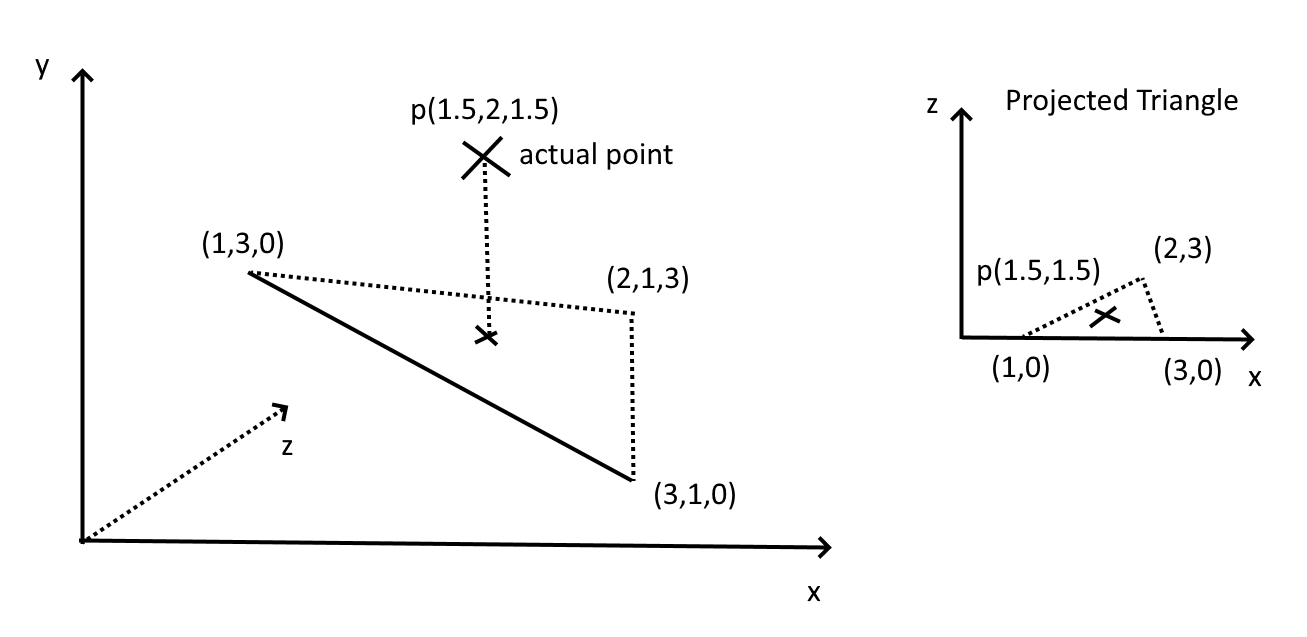
I tried to draw it to better explain what i'm asking, sorry if its not to scale. So if the u and v values are calculated by the projected triangle and coordinates, p will be considered inside the projected triangle. However, it is not on the actual triangle as the y coordinate is higher up. I'm clearly misunderstanding something here, so I was wondering what it was. Thanks for the link though! I will be sure to check it out!
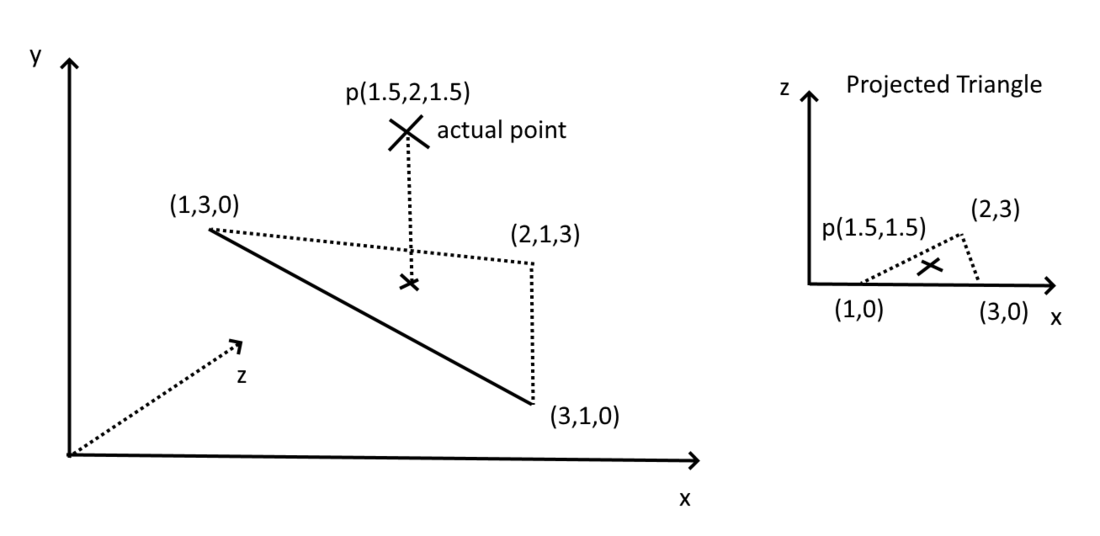
This is the main misunderstanding I have with this algorithm. Is it not projecting the triangle defined by a b c onto a 2d plane by removing the largest dimension, as you have said, to get the largest area to reduce degeneracy. However, I am clearly misunderstanding how the u and v values calculated by the projection can translate over to determining if a point falls within the triangle in 3 dimensions. Hopefully my drawing is clear enough though the scale is a little off. Thank you for taking the time to help me!
7 minutes ago, OandO said:
Because you already know the positions of the triangle's vertices in 3D world space, and barycentric coordinates are relative to the triangle's vertices. if the Point p was above or below the 3D plane the triangle lies in (Using the triangle's normal, not the projection axis) you would lose that information, but if you're doing what I think you're doing, Point p should already lie exactly on that plane.
I think I replied to your question after you replied to mine haha sorry but I do not really know what I'm doing. Can you elaborate on what you think I'm doing? Haha sorry i'm such a noob. I understand that they are relative to the triangle vertices in 3 dimensions, but by projecting isnt it removing one dimension?